 KDE API Reference
KDE API Referencestep/stepcore
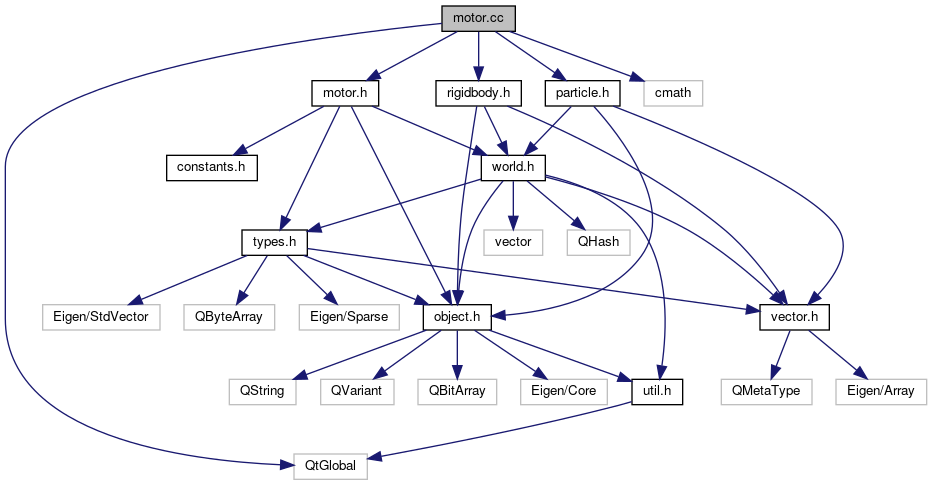
motor.cc File Reference
#include "motor.h"#include "rigidbody.h"#include "particle.h"#include <cmath>#include <QtGlobal>
Include dependency graph for motor.cc:
Go to the source code of this file.
Namespaces | |
| StepCore | |
Functions | |
| StepCore::QT_TR_NOOP ("Circular motor: applies a constant torque to the body") | |
| StepCore::QT_TRANSLATE_NOOP ("ObjectClass","CircularMotor") | |
| StepCore::STEPCORE_META_OBJECT (LinearMotor, QT_TRANSLATE_NOOP("ObjectClass","LinearMotor"), QT_TR_NOOP("Linear motor: applies a constant force to a given position of the body"), 0, STEPCORE_SUPER_CLASS(Item) STEPCORE_SUPER_CLASS(Force), STEPCORE_PROPERTY_RW(Object *, body, QT_TRANSLATE_NOOP("PropertyName","body"), STEPCORE_UNITS_NULL, QT_TR_NOOP("Body"), body, setBody) STEPCORE_PROPERTY_RW(StepCore::Vector2d, localPosition, QT_TRANSLATE_NOOP("PropertyName","localPosition"), QT_TRANSLATE_NOOP("Units","m"), QT_TR_NOOP("Position of the motor on a body"), localPosition, setLocalPosition) STEPCORE_PROPERTY_RW(StepCore::Vector2d, forceValue, QT_TRANSLATE_NOOP("PropertyName","forceValue"), QT_TRANSLATE_NOOP("Units","N"), QT_TR_NOOP("Value of the force, acting on the body"), forceValue, setForceValue)) STEPCORE_META_OBJECT(CircularMotor | |
| StepCore::STEPCORE_PROPERTY_RW (Object *, body, QT_TRANSLATE_NOOP("PropertyName","body"), STEPCORE_UNITS_NULL, QT_TR_NOOP("Body"), body, setBody) STEPCORE_PROPERTY_RW(StepCore | |
| StepCore::STEPCORE_SUPER_CLASS (Item) STEPCORE_SUPER_CLASS(Force) | |
This file is part of the KDE documentation.
Documentation copyright © 1996-2020 The KDE developers.
Generated on Mon Jun 22 2020 13:16:43 by doxygen 1.8.7 written by Dimitri van Heesch, © 1997-2006
Documentation copyright © 1996-2020 The KDE developers.
Generated on Mon Jun 22 2020 13:16:43 by doxygen 1.8.7 written by Dimitri van Heesch, © 1997-2006
KDE's Doxygen guidelines are available online.
{kind=link}