 KDE API Reference
KDE API Referencestep/stepcore
#include <world.h>
Public Member Functions | |
| Body () | |
| virtual | ~Body () |
| virtual void | addForce (const double *force, const double *forceVariance)=0 |
| virtual void | getAccelerations (double *acceleration, double *accelerationVariance)=0 |
| virtual void | getInverseMass (VectorXd *inverseMass, DynSparseRowMatrix *variance, int offset)=0 |
| virtual void | getVariables (double *position, double *velocity, double *positionVariance, double *velocityVariance)=0 |
| virtual void | resetForce (bool resetVariance)=0 |
| virtual void | setVariables (const double *position, const double *velocity, const double *positionVariance, const double *velocityVariance)=0 |
| virtual int | variablesCount ()=0 |
| int | variablesOffset () const |
Detailed Description
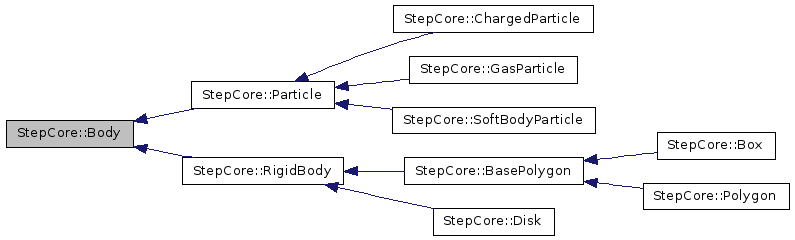
Interface for bodies.
Body is anything that has dynamic variables that require ODE integration
Constructor & Destructor Documentation
Member Function Documentation
|
pure virtual |
Add force and (possibly) its variance to force accomulator.
- Note
- This function is used only by generic constraints handling code, force objects should use body-specific functions.
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
pure virtual |
Copy acceleration (forces left-multiplied by inverse mass) and (possibly) its variances to arrays.
Variances should only be copied if accelerationVariance != NULL.
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
pure virtual |
Get inverse mass and (possibly) its variance matrixes.
Variance should only be copied of variance != NULL.
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
pure virtual |
Copy positions, velocities and (possibly) its variances to arrays.
Variances should only be copied if positionVariance != NULL.
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
pure virtual |
Reset force accomulator and (possibly) its variance to zero.
Variance should only be reseted if resetVariance == true.
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
pure virtual |
Set positions, velocities and (possibly) its variances using values in arrays and also reset accelerations and its variances.
Variances should only be copied and reseted if positionVariance != NULL.
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
pure virtual |
Get count of dynamic variables (not including velocities)
Implemented in StepCore::RigidBody, and StepCore::Particle.
|
inline |
The documentation for this class was generated from the following file:
Documentation copyright © 1996-2014 The KDE developers.
Generated on Tue Oct 14 2014 22:43:06 by doxygen 1.8.7 written by Dimitri van Heesch, © 1997-2006
KDE's Doxygen guidelines are available online.
{kind=link}